ScopeDog is designed to use the Nexus DSC to determine telescope position and link through to planetarium and telescope control programes such as SkySafari. (Nexus DSc users running recent firmware may have noticed that ScopeDog is included as an option in the Comms setup menus.)
The mk3eF includes the eFinder functions (plate-solving to increase pointing accuracy)
The drive can be operated without a camera plugged with just the loss of the plate-solving features.

Standard bipolar stepper motors are used, typically with integral gearboxes. I use Nema17, 1.8deg step angle, 1.68A bipolar steppers with integral high precision planetary gearboxes.
A hand box (connected via USB) provides sensitive control of telescope position via a light touch joystick. Three speeds are available, all user programmable.
Internally, the system uses commercially available electronic modules, making assembly straightforward, with almost no soldering required! At its heart is a Raspberry Pi computer. The necessary firmware is available as a disk image, requiring no programming skills.
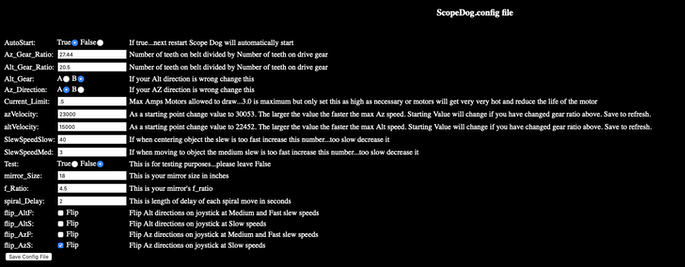
Below is shown a screen shot of a browser window accessing the ScopeDog configuration data over wifi.