
The mk3, with its integrated eFinder needs a new hand pad combining the features of both. I based it on the eFinder hand pad, as it is cheaper, has an OLED text display, and a flexible Pi Pico processor.
The hand pad just comprises a box/case, OLED display, joystick, 5 way switch and Pi Pico processor. In the photo at right the Pico is mounted underneath the OLED. The whole thing is powered from the USB cable that connects the Pico to the ScopeDog USB port.
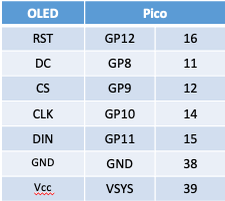
The OLED I am using is a 2.23” Waveshare device. conneted to the Pico thus….
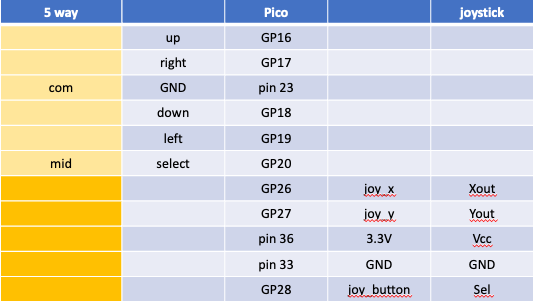
The analogue joystick and 5 way navigation switch are wired to the Pico thus…...

It certain makes for a neat hand pad. Easily programmable too (microPython)
Now I can display ScopeDog functions too. Basic displays/modes are…
- Main display is a continually updated readout of scope RA, Dec, Az & Alt
- On requesting a solve, the display shows the delta with respect to the Nexus readout.
- On requesting a GoTo, the display shows the distance to be travelled at each iteration, and finally the actual plate-solved delta with respect to the target.
- During initial calibration and subsequent local-syncs, the display shows the Nexus align status and number of syncs requested so far.
- In all cases the current ScopeDog manual slew speed is shown
- Other screens can be accessed to show and change set up data

This example shows the eFinder plate-solving results, allowing tweaking of focus and exposure.
Parts List
1x Hammond 1553TTBK Handheld Enclosure (or similar)
1x Raspberry Pi Pico
1x 2.23” OLED display module (Waveshare)
1x Analogue joystick
1x 5-way navigation switch (shown is Navimec module)
assorted small screws and nuts.